Project Team:
Prof. Delwyn Moller (Project lead, University of Auckland)
Prof. Matthew Wilson (GRI)
Wider team:
Xiaoyou Lin, Mike Laverick and Chris Seal (University of Auckland), Wayne Thomas (Air New Zealand), Chris Ruf and Steven Musko (University of Michigan), Andrew O’Brien (Ohio State University), Scott Gleason (UCAR), and others.
Funding
MBIE Catalyst fund and NASA
Summary:
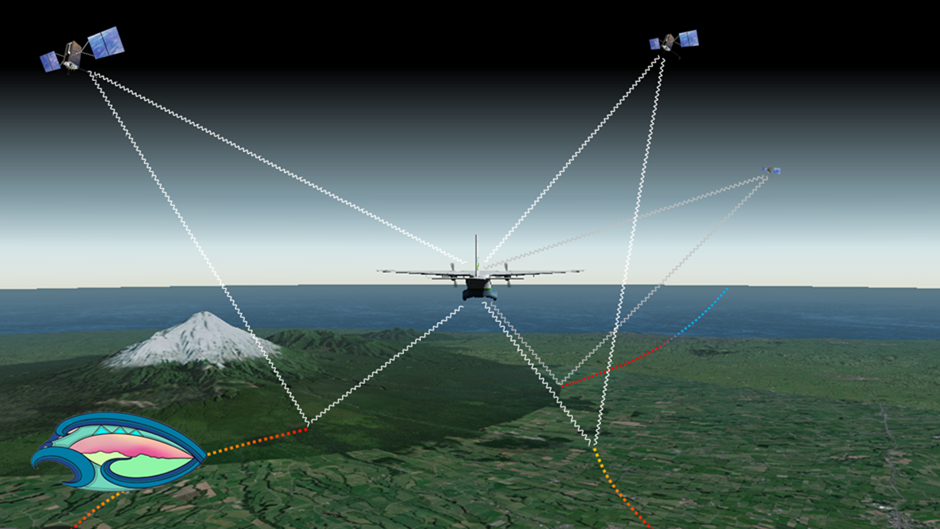
The GRI is playing a leading role within the Rongowai (“sensing water”) mission, that aims to build a detailed picture of the complex patterns of water across New Zealand’s complex environment. In a novel partnership with a commercial airline, we have mounted a next-generation GNSS-R sensor on an Air New Zealand Q300 aircraft (tail number ZK-NFA). The sensor records the reflection of signals from the global navigation satellite system (GNSS), which includes the global positioning system (GPS). Usually used for positioning and navigation, these signals are broadcast in L-band radio spectrum and can penetrate clouds, rain and vegetation. The Rongowai sensor uses these “signals of opportunity” to infer properties of the ground surface from where the signals are reflected. In particular, the reflection of signals is changed depending on surface water and soil moisture.
The GRI is working with the University of Auckland, in partnership with Air New Zealand and the University of Michigan, Ohio State University and the University Corporation for Atmospheric Research (UCAR). We will be working with the data obtained to develop and test algorithms for retrieval of soil moisture and surface inundation extent.
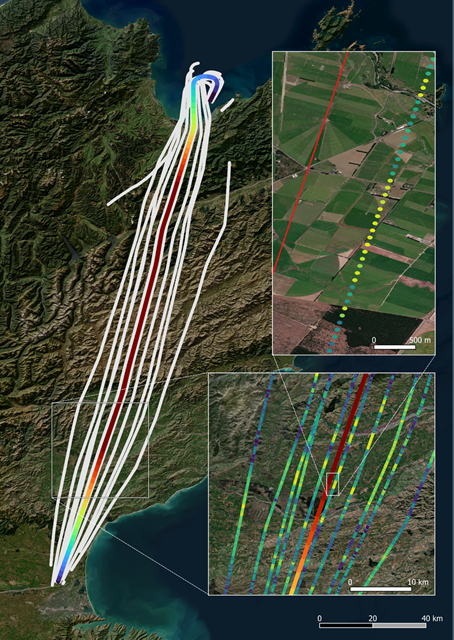
Rongowai will give us significantly improved observations of soil moisture and flood dynamics across most of the country. During each flight, the sensors on-board the aircraft will record direct and reflected signals from up to 20 GNSS satellites simultaneously. The data will enable us to estimate soil moisture and surface water, which will be extremely valuable for shaping our understanding of important issues ranging from water resources in agriculture to wetland dynamics and flood risk.
Mounting the sensor on an Air New Zealand aircraft has only been possible with the strong support of the airline’s engineering team. As it is a passive sensor, it does not generate any of its own signals, a necessary characteristic for meeting aviation safety requirements. During each flight, the sensor starts recording signals once the aircraft has reached a set altitude. The data recorded are transmitted via the cellular network only once the aircraft has arrived at its destination.
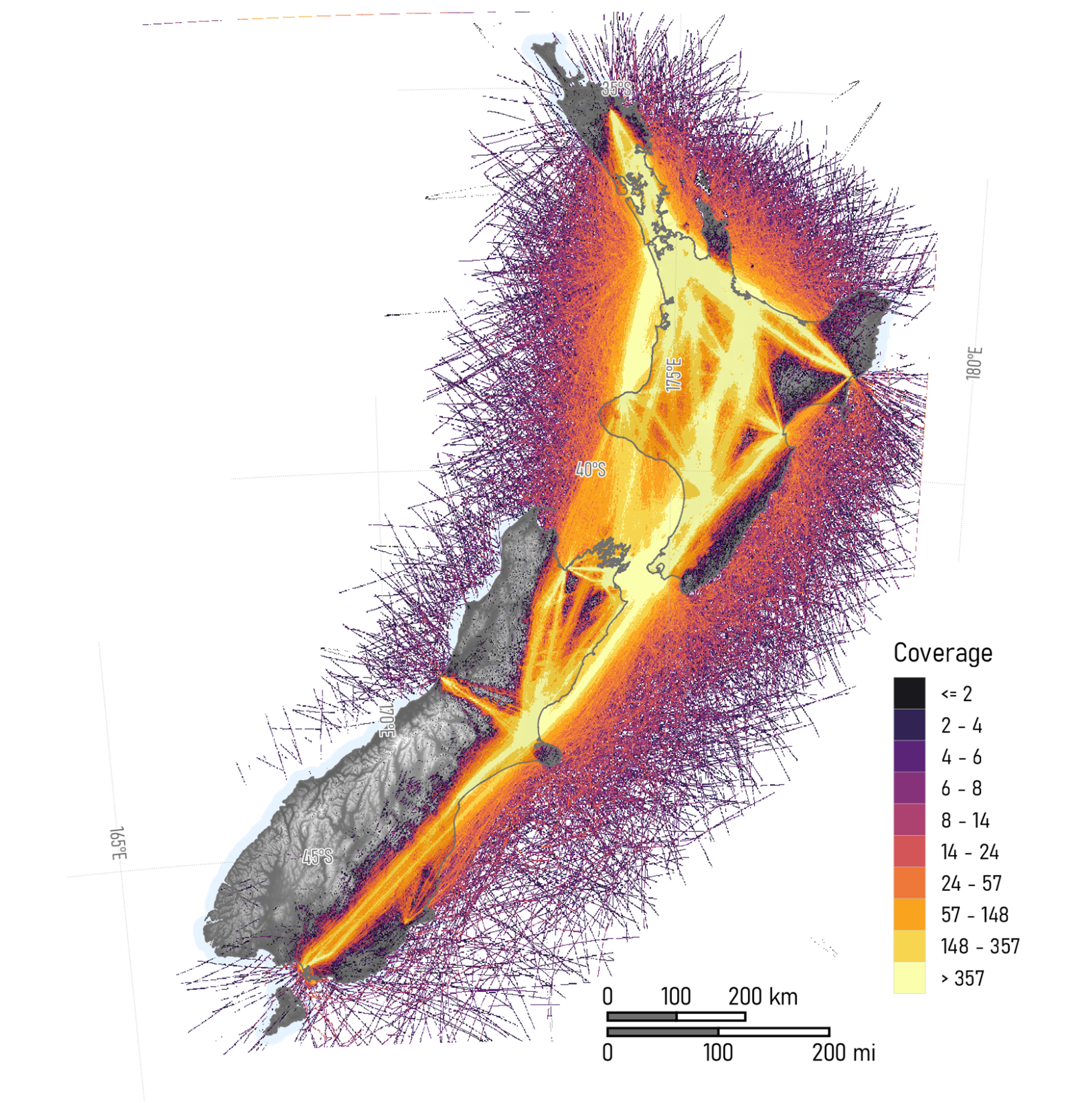
The locations where observations are obtained is, of course, dependent on the scheduled operations of the Air New Zealand Q300 aircraft. This makes the mission unusual in remote sensing: normally we use either satellite-based data, with known orbits and repeatable observations, or airborne data obtained using private aircraft, with complete control of where and when observations are obtained but with the all the expense of aircraft operations. While using a commercial aircraft means that we do not have any control over where and when observations are obtained, as the aircraft routinely operates several flights a day, we gain a significant volume of data with the other benefits of airborne remote sensing, such as increased spatial resolution compared to space-based remote sensing.
A Q300 aircraft was selected due to the wide coverage of the type across New Zealand’s smaller airports. In particular, the Q300 flies as far north as Kerikeri in Northland, which is not serviced by the Airbus A320 jets. This provides a further opportunity for us to compare data with GNSS-R measurements from the satellite-based CyGNSS (“Cyclone GNSS”), which only observes areas in New Zealand north of Auckland. CyGNSS uses an earlier version of the same type of sensor as Rongowai, but as it is space-borne its ground resolution is much coarser.
Over time, Rongowai will enable an increased understanding of the spatial and temporal variability in surface water and soil moisture across New Zealand. These data will enable us to fill a significant gap in our understanding, due to the current absence of available data.
Currently, soil moisture data are available from satellite systems such as SMAP (Soil Moisture Active Passive), but at a spatial resolution of several kilometres, or from in situ gauges, but only at a point location. The resolution of data from Rongowai data is variable, but in the order of 10s of meters. The first flight of Rongowai was in late September 2022; once testing is processing chains are developed, data from Rongowai will be made freely available, likely sometime in 2023.
To track where Rongowai is scheduled to fly, check here: https://www.flightradar24.com/data/aircraft/zk-nfa
Outputs:
D Moller, M Wilson, R Datta, A O’Brien, R Linnabary, C Ruf, Rongowai: A pathfinder NASA/NZ GNSS-R initiative supporting SDG-15 – Life on Land: International Geosciences and Remote Sensing Symposium (IGARSS), Kuala Lumper, 17 – 22 July, 2022.
D. Moller, M. Wilson, R. Datta, A. O’Brien, R. Linnabary and C. Ruf, “Rongowai: A Pathfinder NASA/NZ GNSS-R Initiative Supporting SDG-15 – Life on Land,” IGARSS 2022 – 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 2022, pp. 4212-4215, doi: 10.1109/IGARSS46834.2022.9884397.
Datta, R., Wilson, M., Moller, D., and Ruf, C., Soil Moisture Estimation from CYGNSS using Machine Learning: AGU Fall Meeting, Chicago, 12-16 December.
Matthew Wilson, Delwyn Moller, Sharmila Savarimuthu, Xander Cai, Chris Ruf. Sensing Water: First estimates of soil moisture from the Rongowai airborne remote sensing mission for GNSS-Reflectometry. AGU Fall Meeting 2023. San Francisco, CA. 11-15 December. Poster No. 0555, id. NS43B-0555.